 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选]
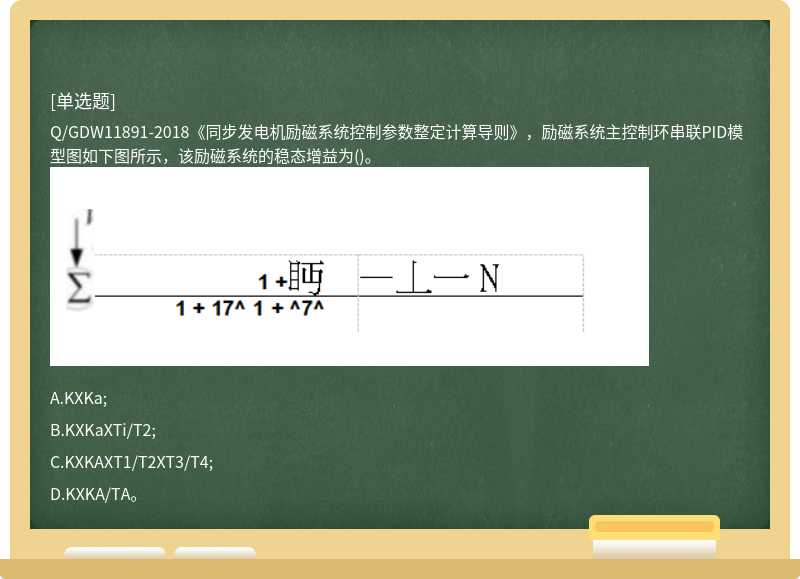
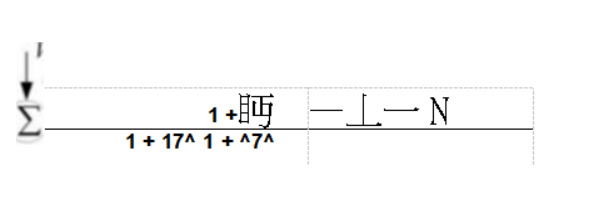
Q/GDW11891-2018《同步发电机励磁系统控制参数整定计算导则》,励磁系统主控制环串联PID模型图如下图所示,该励磁系统的稳态增益为()。
A、KXKa;
B、KXKaXTi/T2;
C、KXKAXT1/T2XT3/T4;
D、KXKA/TA。
查看答案
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
A、KXKa;
B、KXKaXTi/T2;
C、KXKAXT1/T2XT3/T4;
D、KXKA/TA。
 更多“Q/GDW11891-2018《同步发电机励磁系…”相关的问题
更多“Q/GDW11891-2018《同步发电机励磁系…”相关的问题
A、串联PID控制参数应根据同步发电机空载电压阶跃响应试验结果进行整定;
B、空载电压阶跃量:在阶跃扰动不进入非线性调节区域的原则下,静止励磁系统一般取5%阶跃,励磁机励磁系统一般取2%阶跃;
C、静止励磁系统空载电压阶跃响应应满足:上升时间不大于0.5s,振荡次数不超过3次,调节时间不超过5s,超调量不大于30%;
D、励磁机励磁系统空载电压阶跃响应应满足:上升时间不大于0.6s,振荡次数不超过3次,调节时间不超过10s,超调量不大于40%。
A、并联PID控制参数应根据同步发电机空载电压阶跃响应试验结果进行整定;
B、空载电压阶跃量:在阶跃扰动不进入非线性调节区域的原则下,静止励磁系统一般取5阶跃,励磁机励磁系统一般取2%阶跃;
C、静止励磁系统空载电压阶跃响应应满足:上升时间不大于0.5s,振荡次数不超过3次,调节时间不超过5s,超调量不大于30%;
D、励磁机励磁系统空载电压阶跃响应应满足:上升时间不大于0.6s,振荡次数不超过3次,调节时间不超过10s,超调量不大于40%。
E、并联PID控制函数转换成串联PID控制函数时,转换后的串联PID控制函数等效参数应是实数。
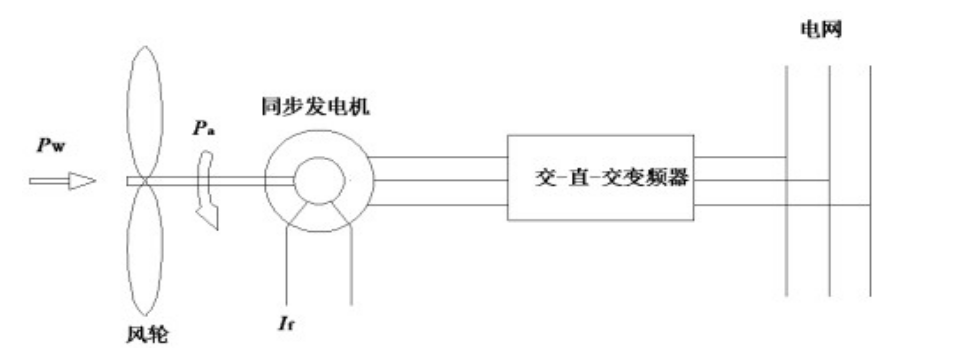
 图3同步发电机变速恒频风力发电系统
图3同步发电机变速恒频风力发电系统









 如果结果不匹配,请
如果结果不匹配,请 